目的
ルンバが低い段差に乗り上げてしまい、タイヤスリップのガタガタ音やエラーとなってしまう事を防止する
背景
バリアフリーのため段差が超えられない悩みはないが
登ってほしくない段差に登ってしまう
 こんな感じの段差がやっかい
こんな感じの段差がやっかい
試そうとしたこと
- バーチャルウォールの設置 → 毎回実施はめんどくさく続かない
- 窓枠にそって糸や針金を張る → 取り返しがつかなそう
- 物理壁を設置 → 見た目が,,,
気付き
Braavaを手に入れたがBraavaは乗り上げずに掃除をしてくれる

RoombaにRoombaSkirtを履かせる
以外にうまくいったのでまとめました
 材料
材料
- 両面テープ
- ビニールテープ(お好みで)
- プラスチックシート 1mm位(廃品から適当にカット)
セルタックは粘着力が強すぎず弱すぎず、後に残りづらいので重宝してます
基本的に押すとペコペコなるセンサー部分をカバーすれば良いのですが注意点があります
 真ん中部分は充電器に載る際に反応して自分で充電できなくなってしまうため履かせない
真ん中部分は充電器に載る際に反応して自分で充電できなくなってしまうため履かせない
 ブラシがワシャワシャなる部分は適当に切ってあげる
ブラシがワシャワシャなる部分は適当に切ってあげる
 こちらは特に無し
こちらは特に無し
以上で窓際掃除も立派にこなしてくれるようになりました。
その他Tips
充電器のズレ防止
 100円ショップのすべり止めシートを利用
100円ショップのすべり止めシートを利用
ルンバ発進基地


そもそも
Braava(旧Mint)の完成度がすごい、、、iRobot社が買収したのもうなづけます
止まって欲しい場所でちゃんと止まって、屋内GPSっぽい物と連携して
効率的にお掃除してくれます。
Roombaの低い段差で足踏み外し問題
低い段差乗り上げは解消したのですが、低い段差の足踏み外し問題は解決が難しそうです
 Roombaの床設置確認赤外線距離測定センサ
Roombaの床設置確認赤外線距離測定センサ
そもそもホコリが付着しやすい場所ので光学式はつらそうに見えます
(2011年ころの古いRoombaなので新しい物はわかりません)
 Mintは適度な跳ね返りのある物理スイッチで
Mintは適度な跳ね返りのある物理スイッチで
中身はバネとフォトインタラプタで実装されておりました
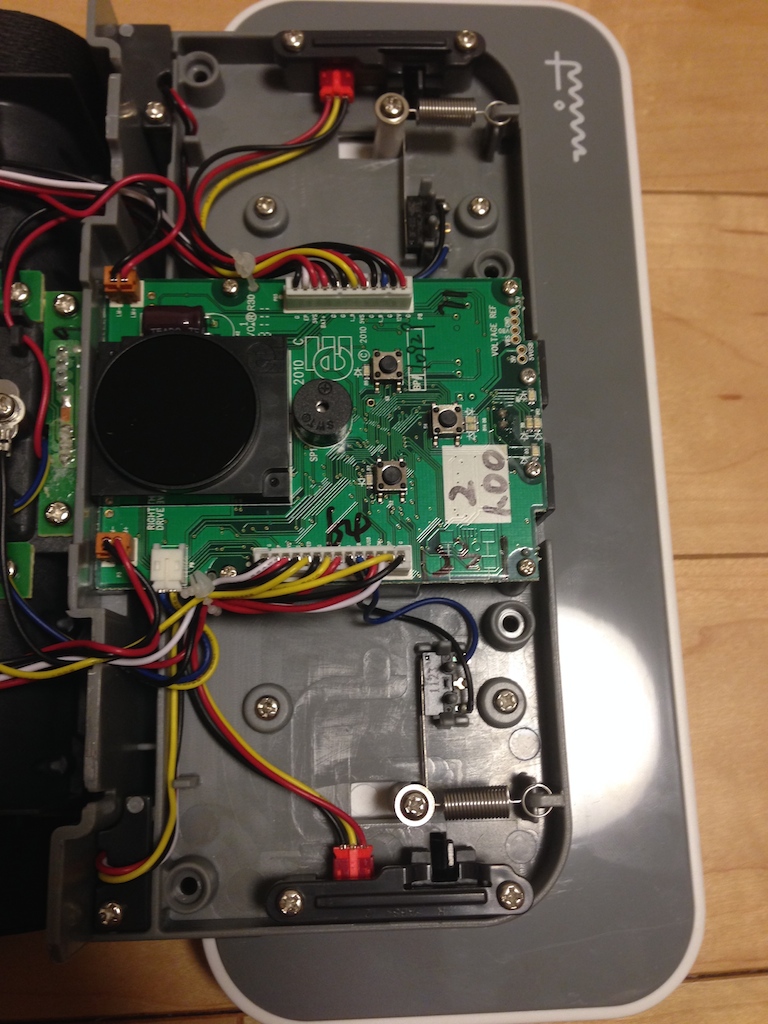 上下のマイクロスイッチで接触を検知
上下のマイクロスイッチで接触を検知
上下の赤コネクタの先がフォトインタラプタです
R2D2にも似た機構で採用検討中です